


Learn how to transpose a melody or a score from E♭ to B♭. This transposition can be useful for clarinet in B♭, trumpet in B♭ or sopranino saxophone in B♭.
How to transpose from E♭ to B♭
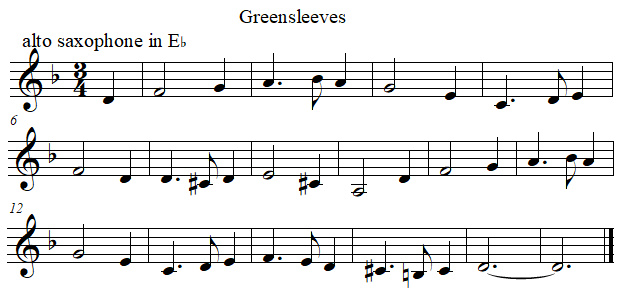
Melody to transpose from E♭ to B♭
Below is a melody we want to transpose from E♭ to B♭:
Transposing this melody for clarinet in B♭, trumpet in B♭
The method is the same described in Transposition:
- From where to where?: I am a clarinet in B♭ or a trumpet in B♭ and I want to play a E♭ score for alto saxophone, and I know that a written C4 for alto saxophone in E♭ is sounding E♭3 and that a written C4 for clarinet in B♭ or a trumpet in B♭ is sounding B♭3 (read Transposing instruments).
- What interval?: I must play all a descending perfect fifth lower.
- Initial key?: Here the key is F Major
- New key?: Subtracting a descending perfect fifth to F Major produce Bb Major
- Key Signature Identification?: The new key signature for Bb Major is 2 flats (2♭)
- Which clef to use (sight-reading)?: Here you must read the music score with a mezzo-soprano clef
Result:

You should be careful with accidentals:
- Bar 7,8 and 15: C♯ become F♯
- Bar 15: B♮ become E♮
Hello! Very useful site, however it appears you have gotten a little confused between the soprano and sopranino saxophone at the top of the page. You have written that this could be used for a B flat sopranino, when in fact that instrument would be in the key of E flat (one octave above the alto saxophone). I believe you instead mean that this technique could be used when playing a B flat soprano saxophone. Don't mean to be a pain, just thought it was worth pointing out.
1 anwser(s) :
Hello
thanks for your comment, it is now fixed
Best regards
Reply to this/these comment(s)